Versión 2022.45.15
Publicado el 8 de abril de 2023
Mapa de liberación
Despliegue mundial actual
Tasa de distribución
Despliegue de la flota por días
Notas de publicación
FSD Beta v11.3.6
Incluido en 2022.45.15
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
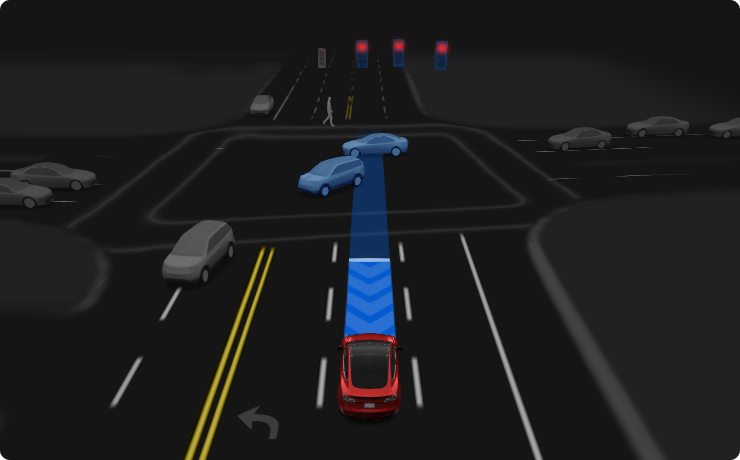
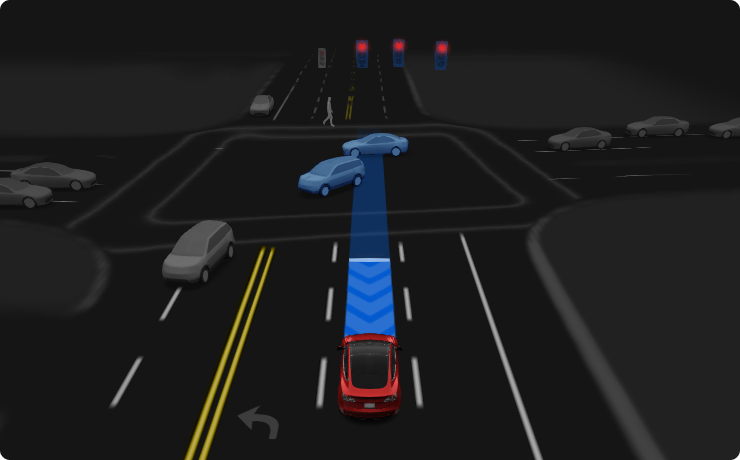
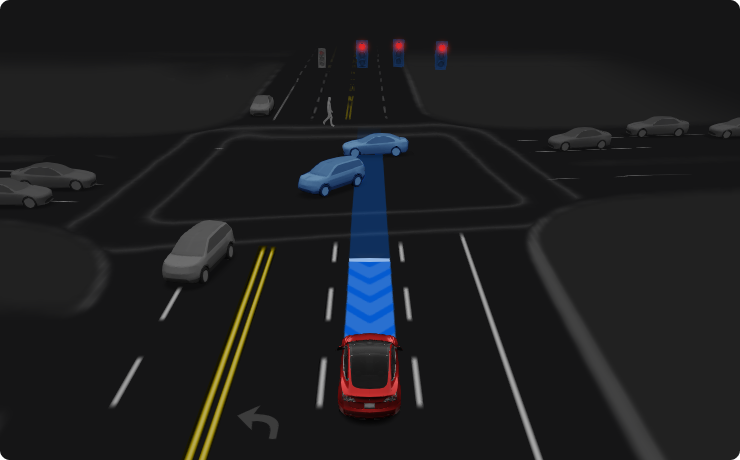
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
- Ajustada la posición de la Cámara automática de ángulo muerto cuando FSD Beta está activado para dar prioridad a la visualización del Piloto automático. Arrastra la cámara para guardar posiciones personalizadas.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.15
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.
FSD Beta v11.3.5
Incluido en 2022.45.14
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
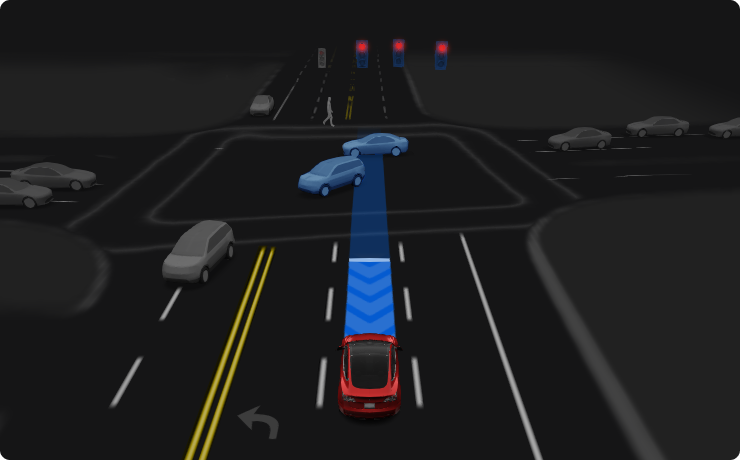
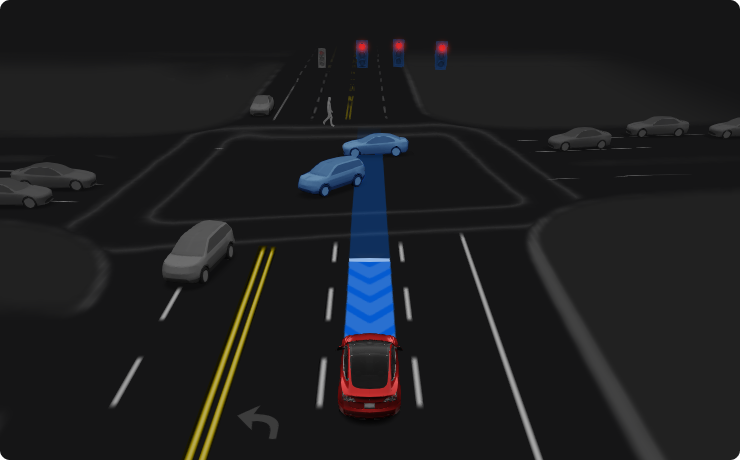
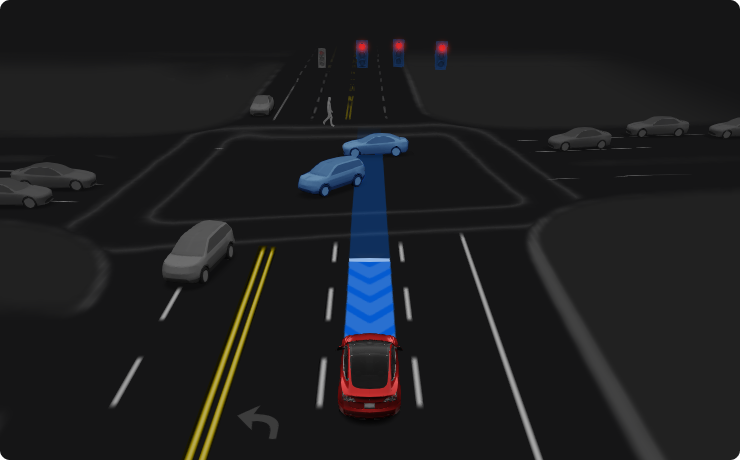
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
- Ajustada la posición de la Cámara automática de ángulo muerto cuando FSD Beta está activado para dar prioridad a la visualización del Piloto automático. Arrastra la cámara para guardar posiciones personalizadas.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.14
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.
FSD Beta v11.3.4
Incluido en 2022.45.13
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
- Ajustada la posición de la Cámara automática de ángulo muerto cuando FSD Beta está activado para dar prioridad a la visualización del Piloto automático. Arrastra la cámara para guardar posiciones personalizadas.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.13
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.
FSD Beta v11.3.3
Incluido en 2022.45.12
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
- Ajustada la posición de la Cámara automática de ángulo muerto cuando FSD Beta está activado para dar prioridad a la visualización del Piloto automático. Arrastra la cámara para guardar posiciones personalizadas.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.12
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.
FSD Beta v11.3.2
Incluido en 2022.45.11
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
- Ajustada la posición de la Cámara automática de ángulo muerto cuando FSD Beta está activado para dar prioridad a la visualización del Piloto automático. Arrastra la cámara para guardar posiciones personalizadas.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.11
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.
FSD Beta v11.3.1
Incluido en 2022.45.10
- Habilitada la FSD Beta en autopista. Esto unifica la pila de visión y planificación en carretera y fuera de ella, y sustituye a la pila de carretera heredada, que tiene más de cuatro años. La pila de autopista heredada sigue basándose en varias redes de una sola cámara y un solo fotograma, y se configuró para gestionar maniobras sencillas en carriles específicos. Las redes de vídeo multicámara y el planificador de nueva generación de la FSD Beta, que permiten interacciones más complejas de los agentes con menos dependencia de los carriles, permiten añadir comportamientos más inteligentes, un control más suave y una mejor toma de decisiones.
- Se ha mejorado en un 15% la detección de casos de atropello cercano, sobre todo en camiones grandes y situaciones de alta velocidad de guiñada, mediante 30.000 clips adicionales autoetiquetados extraídos de la flota. Además, se ha ampliado y ajustado el control de velocidad específico para objetos atropellados.
- Mejora la posición del ego en carriles anchos, desviándolo en la dirección del giro próximo para permitir que otros coches maniobren alrededor del ego.
- Mejora la maniobrabilidad en escenarios con curvas pronunciadas o camiones de gran tamaño mediante el desplazamiento en el carril para mantener las distancias de seguridad con otros vehículos en la carretera y aumentar el confort.
- Comportamiento mejorado para los cambios de carril de bloqueo de trayectoria en tráfico denso. Ahora Ego mantendrá más distancia en los carriles bloqueados para cubrir posibles huecos en el tráfico denso.
- Mejora los cambios de carril en escenarios de tráfico denso al permitir una mayor aceleración durante la fase de alineación. Esto da lugar a una selección de huecos más natural para adelantar a los vehículos del carril adyacente muy cerca del ego.
- Se han suavizado los giros mejorando la coherencia de detección entre las predicciones de carriles, líneas y bordes de carretera. Esto se consiguió integrando la última versión del módulo de guiado por carriles en la red de bordes y líneas de carretera.
- Mejora de la precisión para detectar la semántica de movimiento de otros vehículos. Se mejoró la precisión en un 23% para los casos en que otros vehículos pasan a circular y se redujo el error en un 12% para los casos en que el Piloto Automático detecta incorrectamente que su vehículo líder está aparcado. Esto se consiguió aumentando el contexto de vídeo en la red, añadiendo más datos de estos escenarios y aumentando la penalización por pérdida de vehículos relevantes para el control.
- Horizonte de optimización de trayectoria máxima ampliado, lo que da como resultado un control más suave para carreteras de gran curvatura y vehículos lejanos cuando se conduce a velocidad de autopista.
- Mejora el comportamiento al volante junto a una fila de coches aparcados en carriles estrechos, prefiriendo desplazarse y permanecer dentro del carril en lugar de cambiar innecesariamente de carril o reducir la velocidad.
- Mejora de las maniobras de cambio de carril consecutivo mediante una mejor fusión entre la localización basada en la visión y el recuento de carriles del mapa grueso.
- Se han añadido fragmentos de texto en la interfaz de usuario para comunicar las próximas maniobras que la FSD Beta tiene previsto realizar. También se ha mejorado la visualización de las próximas ralentizaciones a lo largo de la trayectoria del vehículo. Los chevrones se representan con opacidad y velocidad variables para indicar la intensidad de la ralentización, y aparece una línea continua en los lugares donde el coche se detendrá.
- Se mejoró el recuerdo y la precisión de la detección de objetos, reduciendo notablemente el error de posición de los semirremolques en un 10%, aumentando el recuerdo y la precisión de los vehículos que cruzan a más de 100 m de distancia en un 3% y un 7%, respectivamente, y aumentando el recuerdo de las motocicletas en un 5%. Esto se consiguió aplicando controles de calidad adicionales en nuestro conjunto de datos de dos millones de clips de vídeo autoetiquetados.
- Reducción de los falsos desplazamientos alrededor de objetos en carriles anchos y cerca de intersecciones, mejorando el modelado de la cinemática del objeto en escenarios de baja velocidad.
Retirada del mercado por vía aérea (OTA)
Incluido en 2022.45.10
De acuerdo con una reciente llamada a revisión (campaña #23V085 para EE.UU. y #2023-063 para Canadá), Tesla está realizando mejoras en los siguientes comportamientos específicos dentro de FSD Beta:
1. Lógica de decisión mejorada para atravesar o detenerse ante determinados semáforos en amarillo, modelando la decisión como un marco de compromiso que considera estimados: la deceleración necesaria para detenerse, el tiempo para entrar y salir de la intersección, y la distancia recorrida a través de la intersección antes de que el semáforo pase a rojo. Esto debería hacer que el manejo de los semáforos en amarillo fuera más natural y parecido al humano.
2. Se ha mejorado el perfil de control de ralentización longitudinal al llegar a los cruces con señales de stop, para que la maniobra global resulte más perceptible y natural.
3. Se ha mejorado el ajuste de la velocidad del Tesla al entrar en determinadas zonas de velocidad, permitiendo un control más temprano de las señales de límite de velocidad detectadas. La asertividad de la respuesta al reducir la velocidad ante señales de límite de velocidad detectadas viene determinada por la velocidad actual y su diferencia con la velocidad indicada por la señal detectada. Se ha añadido un brillo visual detrás del icono de límite de velocidad en la interfaz de usuario para alertar al conductor cuando la velocidad establecida del vehículo supere en más de un 50% el límite de velocidad detectado. Por último, se ha eliminado la opción de un desfase absoluto del Límite de Velocidad en la FSD Beta; sólo estará disponible el desfase basado en porcentajes.
4. Se ha actualizado el comportamiento para determinados escenarios en los que el Tesla puede maniobrar desde un carril de giro para seguir circulando recto. Estas maniobras se tratarán ahora como un cambio de carril, en el que el indicador de giro se utiliza para alertar a otros conductores de la intención del Tesla.
Como recordatorio, el conductor es responsable del funcionamiento del vehículo incluso cuando la FSD Beta está activada. Debe supervisar constantemente la carretera, mantener las manos en el volante y estar preparado para intervenir para mantener la seguridad.